NASA’s Mars Curiosity Rover continues its trek across the surface of the Red Planet, moving another 98 feet toward its goal, an area of diverse Martian geology known as “Glenelg,” over Labor Day weekend, NASA reported.
The rover is expected to drive further today, but isn’t expected to reach the target, its first on Mars, located 1,300 feet from its landing site, until sometime in the following weeks.
In the meantime, NASA continues to publish breathtaking new imagery of the rover’s surrounds, most of it captured by four of its 17 onboard cameras.
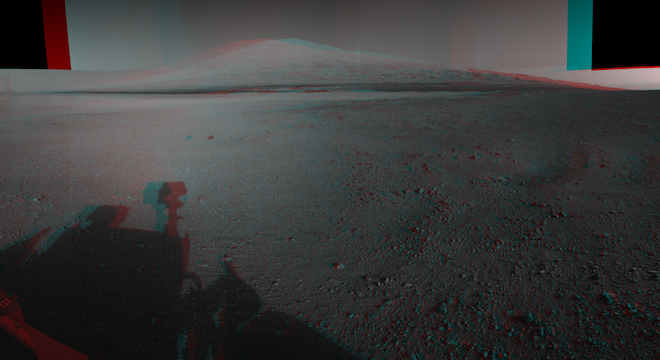
Tuesday was no exception: NASA published a new stereoscopic 3D panorama — that is, a 3D view created by joining two offset images snapped by the rover’s left and right mast-mounted cameras, or Mastcam, which are designed to “study the Martian landscape, rocks, and soils; to view frost and weather phenomena; and to support the driving and sampling operations of the rover,” according to NASA’s Jet Propulsion Laboratory, which is leads the rover’s scientific mission.
See a smaller crop below, which expands to the full panorama when clicked (via NASA):

The imagery depicts the rover’s landing site in central Western Mars, an area that’s been dubbed “Bradbury Landing” in honor of the late sci-fi author, who wrote often about Mars.
However, it requires the classic “red and blue” 3D glasses found in old movie theaters and magazine promotions in order to view in all of its dimensions.
Luckily for those interested Web users that don’t have a spare set of cardboard 3D specs lying around, NASA also released views of the left and right camera eyes separately.
With or without the glasses, the view is an awe-inspiring one, showing the peak of Mount Sharp, a 3.4-mile-high Martian mountain, rising in the distance some 15 miles to the south. NASA’s ultimate destination for the mission is somewhere up the face of the mountain, where it plans to use Curiosity’s drill and laser, in addition to its cameras and 10 total scientific instruments, to study Martian geology for indications that the Red Planet ever could have had conditions capable of supporting life.
NASA noted that although the view was new to us Earthlings, it was old as far as the actual rover’s mission was concerned, snapped on August 8 and 18, with the first of those images coming just two days after the rover’s near-bullseye landing on the Martian surface.
NASA earlier published an image of more wheel tracks left behind by Curiosity in the Martian dust after its drive of 70 feet on Thursday.

Meanwhile, NASA may actually have some competition when it comes to providing the most arresting views of its Curiosity mission thus far: Estonian panoramic photographer Andrew Bodrov, who captured the attention of many a Web user with his own black-and-white 360-degree interactive image of the rover’s view of its landing site, released back in mid-August on the website 360Cities, is back at it again.
On Tuesday, Bodrov sent out an email to his fans noting that he had assembled a new full-color panorama of the Martian surface from 138 separate images snapped by Curiosity’s 34-millimeter Mastcam. (Again, a glitch in the 360cities website forces users to geotag their images to a location on Earth, so the file says the imagery is located in New Mexico, but it’s actually from Mars.)
See Bodrov’s new full-color panorama, posted on the website 360cities, embedded below. Click on it to view the full size version:
Mars Panorama – Curiosity rover in New Mexico